<受賞作品紹介> SilkyEvCam® イベントベースビジョンカメラ活用アイデア・アルゴリズムコンテスト 2024 『センチュリーアークス賞』
"Object-based Visual SLAM with Stereo Event Camera" 包潤秋さん(東京大学工学系研究科)
ダイジェスト
(1)提案の概要
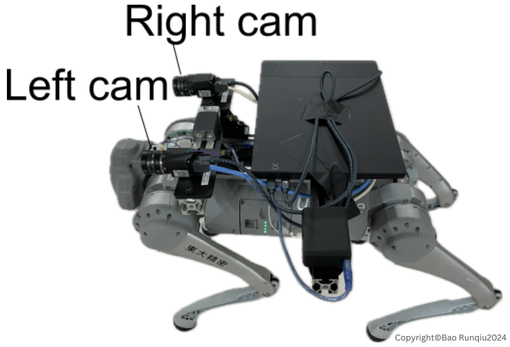
本提案は,イベントベースビジョンカメラ(以下,イベントカメラ)の特徴である広いダイナミックレンジと高い時間分解能を活用して, 多様な光環境下あるいは素早い動作が要求される状況下でも所要の操作ができる4本足ロボット(図1)の開発を目指すものです.ロボットには, Arduinoとよばれるワンボードマイコンを搭載し,マイコンからの指令によって左右のcam(回転を直線運動に変換するための回転ディスク)を制御してロボットの運動(速度や方向)を操作します.
本提案では, 当該ロボットが自身のおかれた周囲環境(まわりの障害物や壁など)と, その環境下での自身の相対位置を同時に推定するSLAM(Simultaneous Localization and Mapping)とよばれるロボット制御システムにイベントカメラで取り込んだデータを組み込むことによって, 上記要求仕様を満たすロボットの実証実験を行っています.
(2)イベントカメラを組み込んだSLAMによる実証実験
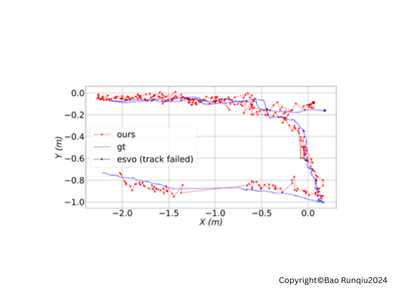
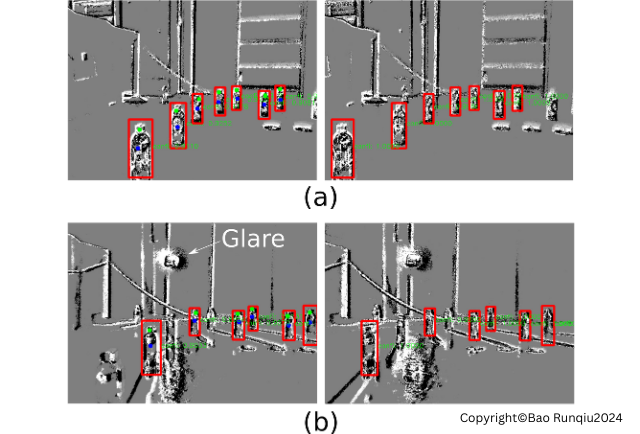
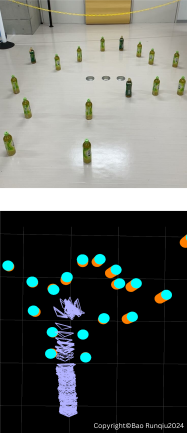
図2に示すような最小照度と最大照度の差の大きい環境下で, あらかじめ決められた目標経路(gt(ground truth))と, イベントカメラを組み込んだSLAMによって制御・操作されたロボットが実際にたどった経路(ours)を比較して図3に示しています.
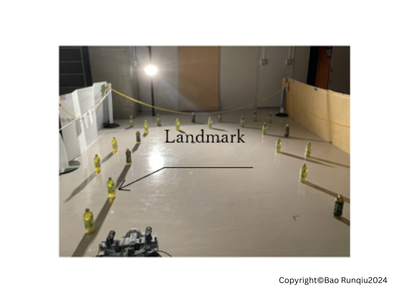
HDR lighting(広い明るさの幅を伴った照明)
今回は実証のための確認実験に留まっていますが,SLAMのニーズは多くあるため,実用化への展開が期待され, 『センチュリーアーク賞』に選出しました.
(3)受賞のご感想
この度,ご賞をいただけることに感謝します.また,自分の実験に1台のイベントカメラを無料で貸してくれることにも大変感謝に存じます.イベントカメラは,ロボットのビジョンセンサーとして必要不可欠な存在だと信じています.遅延なくチューニングなしでHDR lighting + Fast motionのような極端シナリオでの活用を研究しております.これからも最新のイベントセンサーのご提供をお願いいたく申し上げます.